30cm telescope
30cm望遠鏡の自作
赤道儀の制御系(キーデバイス)
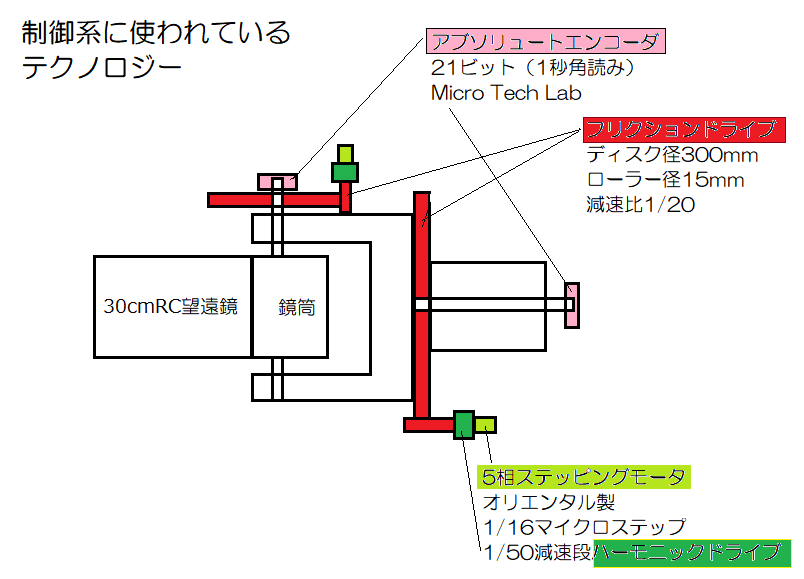
- 位置検出には21ビットアブソリュートエンコーダ
観測開始時に原点出し不要で、同じ天体はいつも同じ座標で視野に導入できる
マイクロテックラボラトリ製AMH-28-1046576N1
- 最終減速段にはフリクションドライブ
(1)バックラッシゼロ
(2)スムーズ
(3)無駄なトルクは不要 小さなモータで高速に望遠鏡を振り回すことができる (伝統的なウォームホイル駆動の場合、モータトルクの大半は、ウォームとホイル間の摩擦に 抗うために使われています。それも望遠鏡を直接動かすために必要なトルクの10倍以上。 そしてれも季節の温度変化で大きく変動する。)
(4)スリップなし よく誤解されるものにフリクションドライブはスリップするというものがあるが、規定の押し 付け力さえ与えていれば滑りません。例えば望遠鏡を大きく90度動かす場合でもオープンループ でステッピングモータに与えるパルス数は計算通り与えれば、どんぴしゃりと位置決めできます!
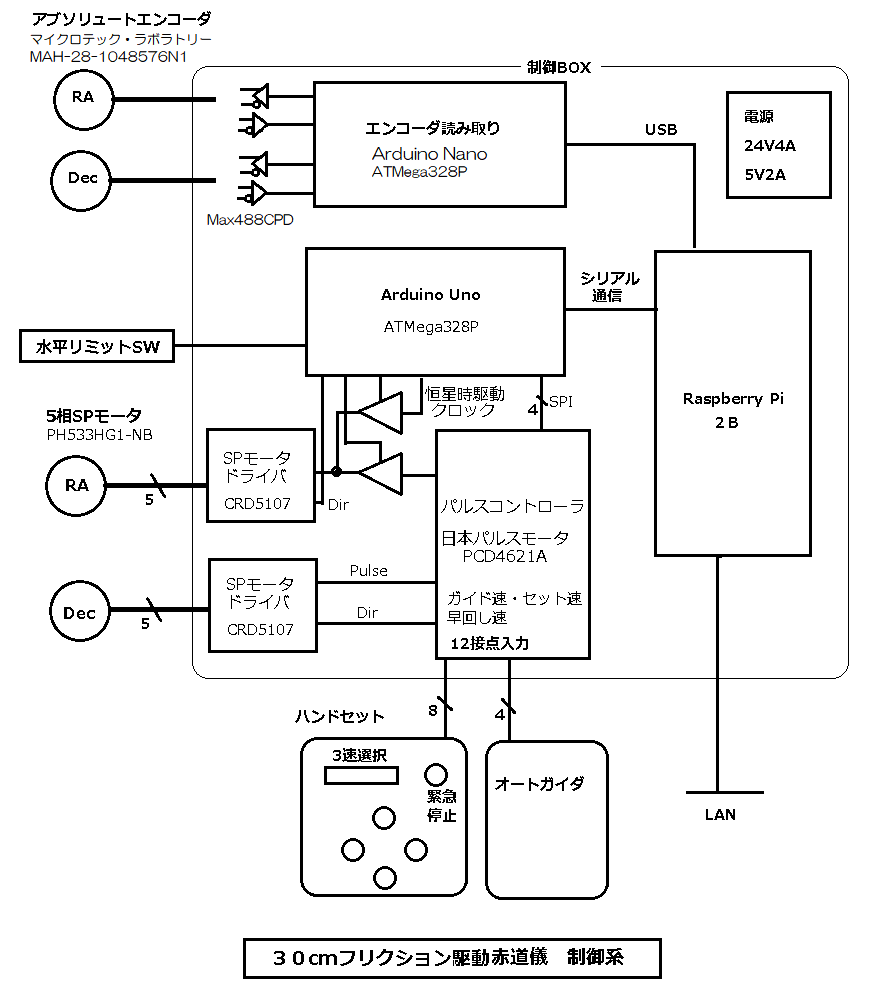
エンコーダ読取り回路とファームウェア
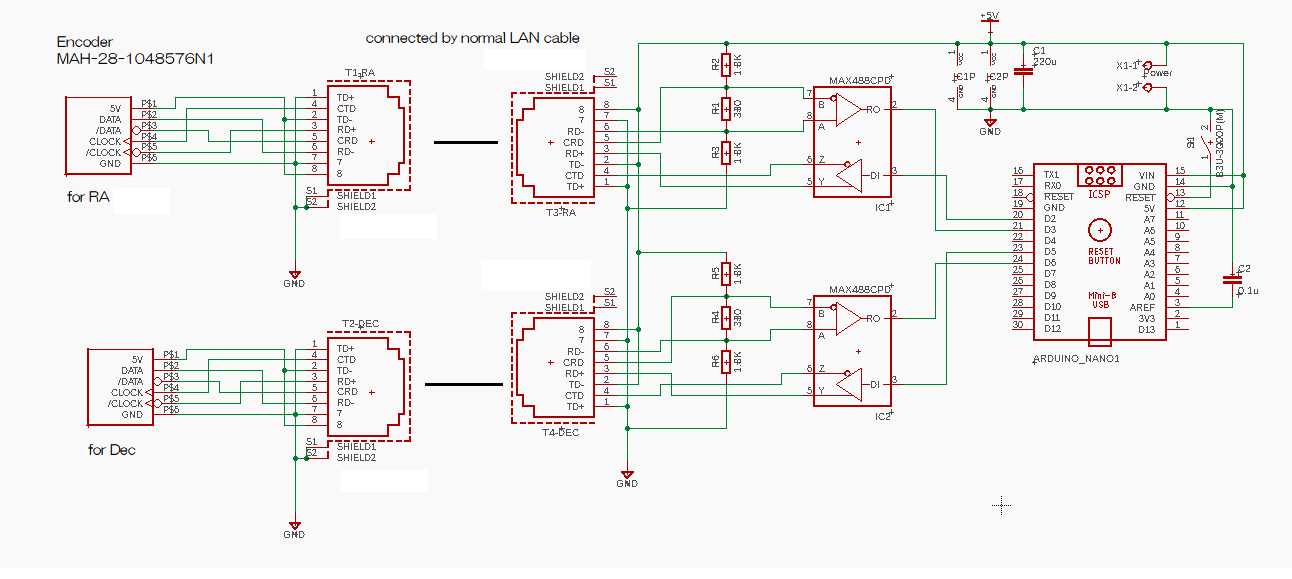 Arduino用sketch(ソースコード)はここ
Arduino用sketch(ソースコード)はここ
モーター制御回路とファームウェア
ここで使ったモーターコントロールLSI(日本パルスモータ製PCD4621A)は、パルス発生器 (定速、加減速 最高2.4Mpps 発生パルス数のフルスケールは24bit)とリミットSW入力 (+端と−端)汎用入出力(8ビット)の機能を2組(2軸分)持った64pinの表面実装部品 で、10mm角のコンパクトなパッケージに収まっています。
望遠鏡の速度は、ガイド速(恒星時の±30%)、セット速(恒星時の3倍)、早回し速(10倍 から3000倍まで4秒間で加速)の3速と恒星時追尾の4種類です。 恒星時追尾用のパルス数は、小数点以下4桁まで持つ半端な周波数なので、Arduinoの16ビット タイマーで生成し、他の3速はPCD4621Aで生成しています。赤経軸モータドライバー には、恒星時用パルスとPCD4621Aで発生したパルスを74HC126で切り替えて供給しています。
PCD4621Aの汎用入出力16ビットを利用して、ハンドセットのNSEWボタンと速度切替スイッチ 及び非常停止ボタンの計8ビット、オートガイダーの入力(ST-4互換)4ビットの合計12ビット を入力しています。
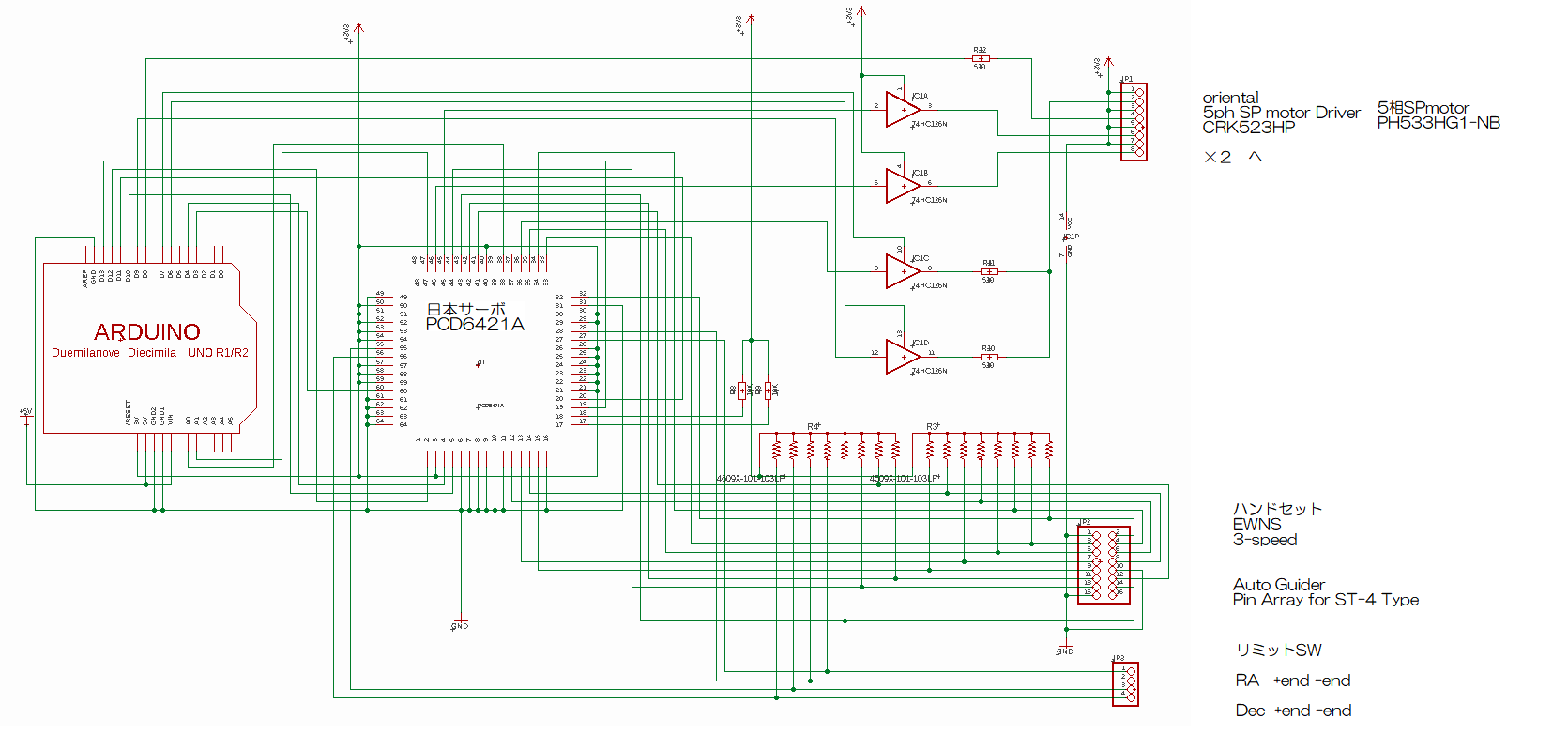 Arduino用sketch(ソースコード)はここ
Arduino用sketch(ソースコード)はここ
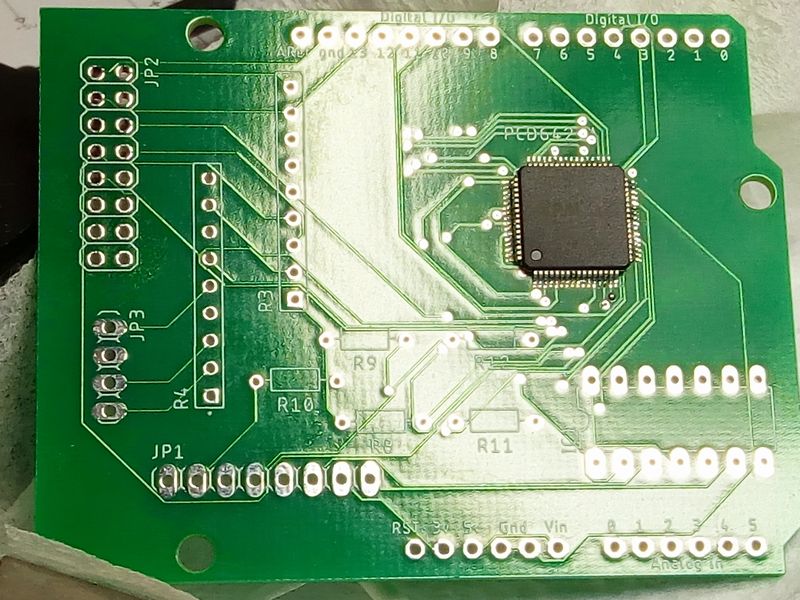
Seeed.comで制作したモータ制御基板が届いたので、LSI(PCD4621A)をハンダ付けしていたところ
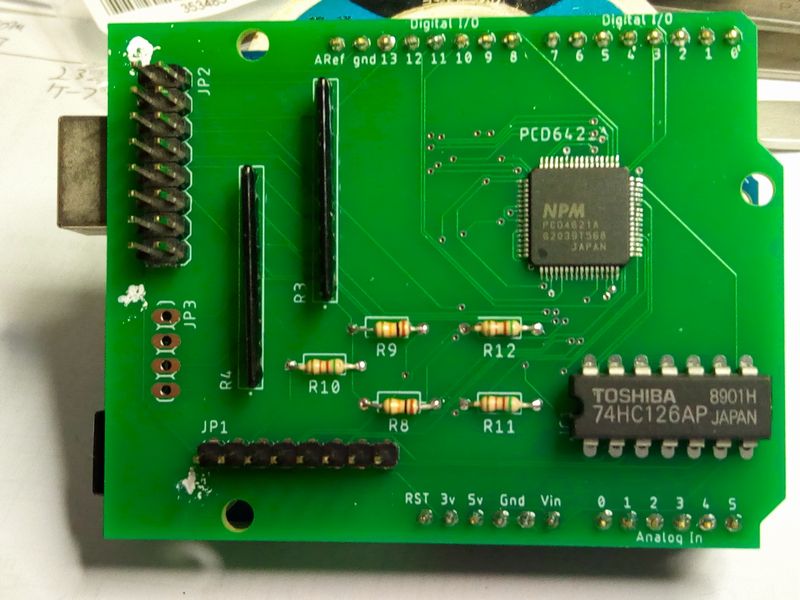
部品を全部実装したもの
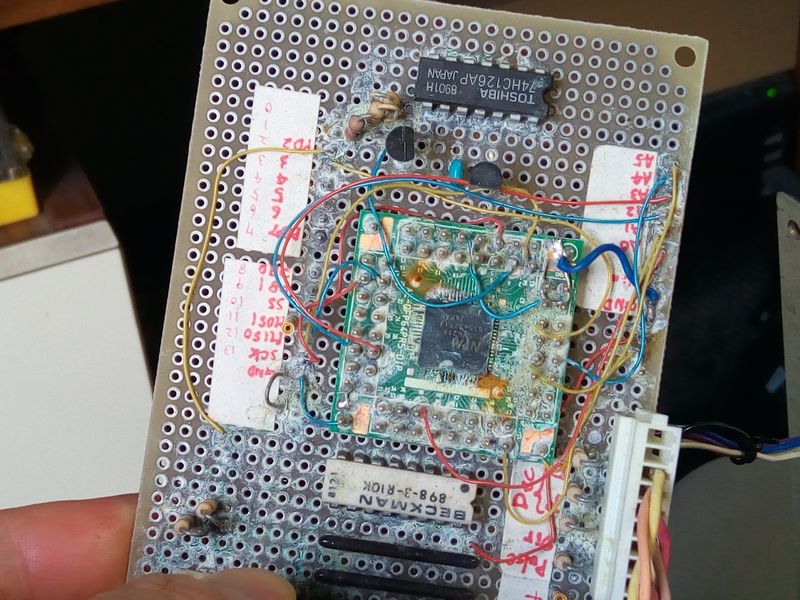
交換前(1昼夜、雨にさらされて壊れた)の手配線ボード
モータは5相ステッピングモータ
2相モータとは異なり、とても滑らかにしかも高速で回ります。
30cmRC望遠鏡
1990
Keyword(s):
References:[OTO-Ohshima Tamashima Observatory-]